29/03/2023
I en verden, hvor robotter bliver stadig mere integrerede i vores dagligdag, fra autonome køretøjer til avancerede produktionsanlæg, er evnen til at navigere præcist og effektivt afgørende. En af de mest fundamentale udfordringer inden for mobil robotteknologi er lokalisering – evnen for en robot til at bestemme sin egen position og orientering i et givent miljø. Uden en pålidelig lokalisering kan en robot ikke udføre sine opgaver, uanset hvor sofistikeret dens planlægning eller perception er. Traditionelle metoder til lokalisering har ofte været enten beregningsmæssigt ekstremt krævende eller har været nødt til at gå på kompromis med nøjagtigheden ved at operere med en grov opløsning af omgivelserne. Dette har skabt et behov for mere effektive og præcise algoritmer. I denne artikel dykker vi ned i Monte Carlo Lokalisering (MCL), en banebrydende probabilistisk tilgang, der har vist sig at være en game-changer inden for dette felt.
Hvad er Mobil Robot Lokalisering?
Mobil robot lokalisering er processen, hvorved en mobil robot bestemmer sin position og orientering (kendt som dens pose) inden for et kort eller et kendt miljø. Forestil dig en selvkørende bil, der skal vide præcis, hvor den er på vejen for at følge ruten sikkert. Eller en lagerrobot, der skal finde den specifikke hylde med en vare. Dette kræver, at robotten kan behandle data fra forskellige sensorer – såsom kameraer, LiDAR (Light Detection and Ranging), inertimåleenheder (IMU) og hjul-encodere – og omsætte disse rådata til en meningsfuld forståelse af dens position i rummet. Lokalisering er grundlaget for næsten alle andre avancerede robotfunktioner, herunder kortlægning, navigation og opgaveplanlægning.
Udfordringer ved Traditionelle Lokaliseringsmetoder
Tidligere metoder til lokalisering stod over for betydelige udfordringer:
- Gitterbaserede metoder: Disse metoder repræsenterer robotens mulige positioner i et højt detaljeret, multidimensionelt gitter. Selvom de kan være meget præcise, kræver de enorme mængder beregningskraft og hukommelse, især i komplekse 3D-miljøer. Denne beregningsmæssige "tunge" natur begrænser deres anvendelighed i realtidsapplikationer, hvor hastighed er kritisk.
- Groft opløste metoder: For at reducere beregningsbyrden blev andre metoder tvunget til at operere med en meget grov repræsentation af miljøet eller robotens potentielle positioner. Dette kompromitterede nøjagtigheden og evnen til at håndtere usikkerhed effektivt.
Disse begrænsninger skabte et klart behov for en ny tilgang, der kunne balancere effektivitet og nøjagtighed.
Monte Carlo Lokalisering (MCL): En Probabilistisk Tilgang
Monte Carlo Lokalisering (MCL) er en del af en bredere familie af probabilistiske metoder kendt som Markov lokalisering. I stedet for at forsøge at beregne en præcis, deterministisk position, arbejder MCL med en sandsynlighedsfordeling over alle mulige positioner i miljøet. Denne fordeling repræsenterer robotens usikkerhed om sin egen placering.
Hvordan Fungerer MCL?
Kernen i MCL er brugen af et sæt partikler (også kendt som 'samples' eller 'vægte'), hvor hver partikel repræsenterer en potentiel pose (position og orientering) for robotten. Disse partikler fordeles i miljøet baseret på den aktuelle sandsynlighedsfordeling. Algoritmen fungerer iterativt og udfører følgende trin:
- Initialisering: Ved start fordeles partiklerne over mulige positioner, enten ensartet i hele miljøet eller koncentreret omkring en kendt startposition.
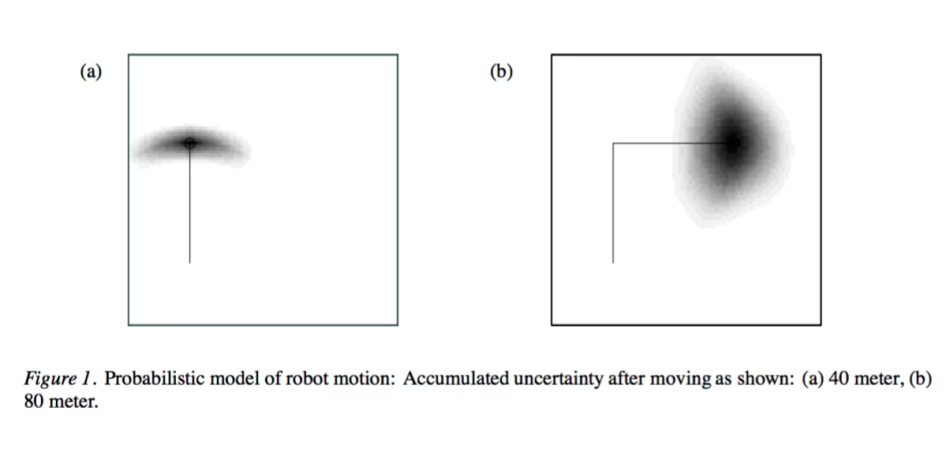
- Forudsigelse (Prediction): Efterhånden som robotten bevæger sig, opdateres partiklernes positioner baseret på robotens bevægelsesmodel (f.eks. data fra hjul-encodere eller IMU). Denne fase introducerer usikkerhed, der afspejler unøjagtigheder i bevægelsesdataene. Partiklerne 'driver' lidt for at afspejle denne usikkerhed.
- Opdatering (Update/Correction): Når robotten observerer sit miljø (f.eks. ved hjælp af LiDAR eller et kamera), bruges disse sensorobservationer til at vurdere, hvor sandsynlig hver partikel er. Partikler, der stemmer godt overens med sensorobservationerne, får en højere vægt, mens partikler, der ikke stemmer overens, får en lavere vægt. Dette trin 'trækker' partiklerne mod de mest sandsynlige positioner.
- Resampling: For at undgå at mange partikler konvergerer til en enkelt løsning og for at opretholde en diversitet i populationen, anvendes en resampling-proces. Partikler med højere vægte har større sandsynlighed for at blive duplikeret, mens partikler med lav vægt ofte fjernes. Dette sikrer, at beregningsressourcerne fokuseres på de mest lovende hypoteser.
Fordele ved MCL
MCL tilbyder en række markante fordele sammenlignet med tidligere metoder:
- Beregningsmæssig Effektivitet: Ved at bruge sampling-baserede metoder til at approksimere sandsynlighedsfordelinger kan MCL allokere beregningskraft præcist der, hvor den er mest nødvendig. Antallet af partikler kan tilpasses dynamisk (on-line), så store samplesæt kun bruges, når der er stor usikkerhed. Dette resulterer i en markant lavere beregnings- og hukommelsesanvendelse.
- Fleksibilitet: MCL kan repræsentere næsten vilkårlige sandsynlighedsfordelinger, hvilket gør den velegnet til komplekse og multimodale (flere mulige positioner) scenarier, som ofte opstår i virkelige robotapplikationer. Den er ikke begrænset af behovet for en simpel, unimodal fordeling.
- Nøjagtighed: Empiriske resultater viser, at MCL opnår højere nøjagtighed end mange traditionelle metoder, selv med et begrænset antal partikler.
- Robusthed: Den probabilistiske natur gør MCL robust over for sensorstøj og usikkerheder i bevægelsesmodellen.
- Nemmere Implementering: Sammenlignet med nogle af de mere komplekse grid-baserede metoder, er MCL generelt lettere at implementere.
Kan MCL Håndtere Flere Partikelpopulationer?
Ja, det er muligt og endda fordelagtigt at anvende MCL med flere uafhængige populationer af partikler. Dette kan forbedre algoritmens robusthed og evne til at finde den korrekte lokalisering i udfordrende situationer.
Multi-Population MCL
En nyere udvikling inden for MCL involverer vedligeholdelse af flere populationer af partikler. Hver population kan potentielt repræsentere en distinkt hypotese om robotens position. Algoritmen kan derefter bruge en mekanisme til at vælge den mest pålidelige population som systemets output på et givent tidspunkt.
Fordele ved Multi-Population MCL
- Håndtering af Multimodalitet: I miljøer med høj symmetri eller gentagne strukturer kan der være flere plausible positioner for robotten. Separate partikelpopulationer kan fokusere på disse forskellige hypoteser.
- Forbedret Konvergens: Ved at have flere populationer kan algoritmen potentielt konvergere hurtigere mod den korrekte løsning, da forskellige populationer kan udforske forskellige dele af tilstandsrummet.
- Valg af den Bedste Løsning: En metrik kan udvikles til at vurdere pålideligheden af hver partikelpopulation. Dette kan baseres på faktorer som partikeldiversitet, overensstemmelse med sensorobservationer eller den samlede sandsynlighed af populationen. Den population, der scorer højest på denne metrik, vælges som den definitive lokalisering.
- Multi-Scale Matching: Til at skabe nye MCL-populationer kan avancerede algoritmer, der anvender multi-scale matching, bruges. Dette indebærer at matche sensorobservationer på forskellige niveauer af detaljer eller opløsninger, hvilket kan hjælpe med at generere mere robuste og velplacerede startpopulationer.
Implementeringsaspekter af Multi-Population MCL
Implementeringen af multi-population MCL kræver yderligere overvejelser:
- Population Generering: Hvordan og hvornår oprettes nye populationer? Dette kan ske baseret på usikkerhedsmål, nye sensorobservationer, der ikke passer godt med eksisterende populationer, eller periodisk.
- Vurdering af Pålidelighed: Udvikling af en robust metrik til at vurdere, hvilken population der er mest sandsynlig, er afgørende.
- Ressourceallokering: Hvordan fordeles beregningsressourcerne mellem de forskellige populationer?
Sammenligning: MCL vs. Traditionelle Metoder
For at illustrere fordelene ved MCL, lad os se på en hypotetisk sammenligning:
| Kriterium | Grid-baserede metoder | Groft opløste metoder | Monte Carlo Lokalisering (MCL) |
|---|---|---|---|
| Nøjagtighed | Meget høj (med fin opløsning) | Middel til lav | Høj |
| Beregningskrav | Meget høje | Lave til middel | Lave til middel (effektiv) |
| Hukommelseskrav | Meget høje | Lave til middel | Lave til middel |
| Fleksibilitet (repræsentation af distribution) | Høj (men kræver mange celler) | Lav | Meget høj |
| Robusthed over for usikkerhed | Middel | Lav | Høj |
| Implementeringskompleksitet | Høj | Middel | Middel |
Ofte Stillede Spørgsmål (FAQ)
Hvad er den grundlæggende idé bag Monte Carlo metoder?
Den grundlæggende idé er at bruge tilfældige sampling-processer til at opnå numeriske resultater. I MCL bruges samples (partikler) til at approksimere en sandsynlighedsfordeling, hvilket gør det muligt at håndtere komplekse problemer, hvor analytiske løsninger er umulige eller upraktiske.
Hvor mange partikler er nødvendige for MCL?
Antallet af partikler afhænger af miljøets kompleksitet, sensordataenes kvalitet og den ønskede nøjagtighed. Mens flere partikler generelt giver en bedre approximation, kan MCL tilpasse antallet dynamisk. Typisk kan et par hundrede til et par tusinde partikler være tilstrækkeligt for mange anvendelser, især med forbedringer som multi-population strategier.
Hvornår er MCL mest nyttig?
MCL er især nyttig i dynamiske miljøer, hvor der er betydelig usikkerhed i både robotens bevægelser og sensorobservationer. Den er også ideel til scenarier, hvor robotten kan miste sin position og skal genfinde den (re-lokalisering), eller hvor der er flere mulige positioner (multimodalitet).
Hvad er forskellen på MCL og Kalman Filter (KF) / Extended Kalman Filter (EKF)?
Kalman Filtre (og EKF/UKF) er også probabilistiske tilgange, men de antager typisk, at sandsynlighedsfordelingerne er Gaussiske (normalfordelte). MCL er mere fleksibel, da den kan håndtere vilkårlige, ikke-Gaussiske fordelinger og multimodalitet, hvilket gør den bedre egnet til mange virkelige robotscenarier, hvor disse antagelser ikke holder.
Konklusion
Monte Carlo Lokalisering repræsenterer et betydeligt fremskridt inden for mobil robotteknologi. Dens evne til at levere høj nøjagtighed med effektiv beregningskraft har gjort den til en foretrukken metode for mange moderne robotsystemer. Udviklingen af teknikker som multi-population MCL viser, at feltet fortsat udvikler sig, og stræber efter endnu større robusthed og ydeevne. Fra autonome køretøjer til avancerede service-robotter er pålidelig lokalisering nøglen, og MCL er utvivlsomt en af de vigtigste teknologier, der muliggør fremtiden for robotnavigation.
Hvis du vil læse andre artikler, der ligner Monte Carlo Lokalisering: Fremtidens Robotnavigation, kan du besøge kategorien Teknologi.