12/07/2025
- Introduktion til MobileNetV2 og Objektdetektering
- Forskellen mellem Billedklassifikation og Objektdetektering
- MobileNetV2 og SSD: En Kraftfuld Kombination til Objektdetektering
- Implementering af Realtids Objektdetektering med MobileNet og SSD
- Almindelige Fejl og Løsninger
- Kørsel af Koden
- Konklusion
- Ofte Stillede Spørgsmål (FAQ)
- 1. Kan MobileNetV2 bruges direkte til objektdetektering?
- 2. Hvad er fordelen ved at bruge MobileNetV2 med SSD?
- 3. Hvilke filer er nødvendige for at køre en MobileNet SSD-model med OpenCV?
- 4. Hvorfor får jeg fejlmeddelelsen 'Error parsing text-format'?
- 5. Hvordan løser jeg 'FAILED: fs.is_open (). Can't open...' fejlen?
Introduktion til MobileNetV2 og Objektdetektering
I den stadigt udviklende verden af mobil og computer vision er effektiviteten af deep learning-modeller afgørende. MobileNetV2 er kendt for sin lette arkitektur, hvilket gør den ideel til implementering på enheder med begrænsede ressourcer. Men når det kommer til objektdetektering, opstår der ofte forvirring. Mange brugere, især nye inden for feltet, oplever, at Keras' implementering af MobileNetV2 leverer billedklassifikation, men ikke de ønskede bounding boxes, der er nødvendige for objektdetektering. Denne artikel vil afklare denne forskel og guide dig gennem processen med at opnå realtids objektdetektering ved hjælp af MobileNetV2 i kombination med Single Shot Detector (SSD) arkitekturen, samt hvordan man løser almindelige fejl, der opstår undervejs.
Forskellen mellem Billedklassifikation og Objektdetektering
Det er vigtigt at forstå den grundlæggende forskel mellem billedklassifikation og objektdetektering. En billedklassifikationsmodel, som den standardimplementering af MobileNetV2, der findes i Keras Applications, tager et helt billede som input og tildeler det én eller flere labels baseret på dets indhold. For eksempel vil en billedklassifikationsmodel identificere et billede som indeholdende en 'elefant' med en vis sandsynlighed. Den fortæller dig dog ikke, hvor elefanten er placeret i billedet.
Objektdetektering går et skridt videre. Den identificerer ikke kun objekter i et billede, men lokaliserer dem også ved at tegne en bounding box (en rektangulær ramme) omkring hvert fundet objekt. En objektdetekteringsmodel vil ikke kun sige 'elefant', men også angive koordinaterne for den boks, der præcist indrammer elefanten. Dette er essentielt for applikationer, der kræver præcis lokalisering af objekter, såsom autonom kørsel, overvågning eller robotik.
Brugerens oprindelige problem med Keras' MobileNetV2-implementering stammer netop fra denne forskel. Keras Applications' MobileNetV2 er primært designet til billedklassifikation og returnerer derfor kun klasse-labels og sandsynligheder, ikke bounding boxes.
MobileNetV2 og SSD: En Kraftfuld Kombination til Objektdetektering
For at opnå objektdetektering med MobileNetV2 skal man kombinere den med en arkitektur, der er specifikt designet til dette formål. Single Shot Detector (SSD) er en populær og effektiv tilgang, der passer godt sammen med MobileNetV2's lette natur. SSD-modeller behandler billedet i ét enkelt 'shot' (gennemløb) og forudsiger både objektets klasse og dets bounding box-koordinater samtidigt. Dette gør dem særligt velegnede til realtidsapplikationer.
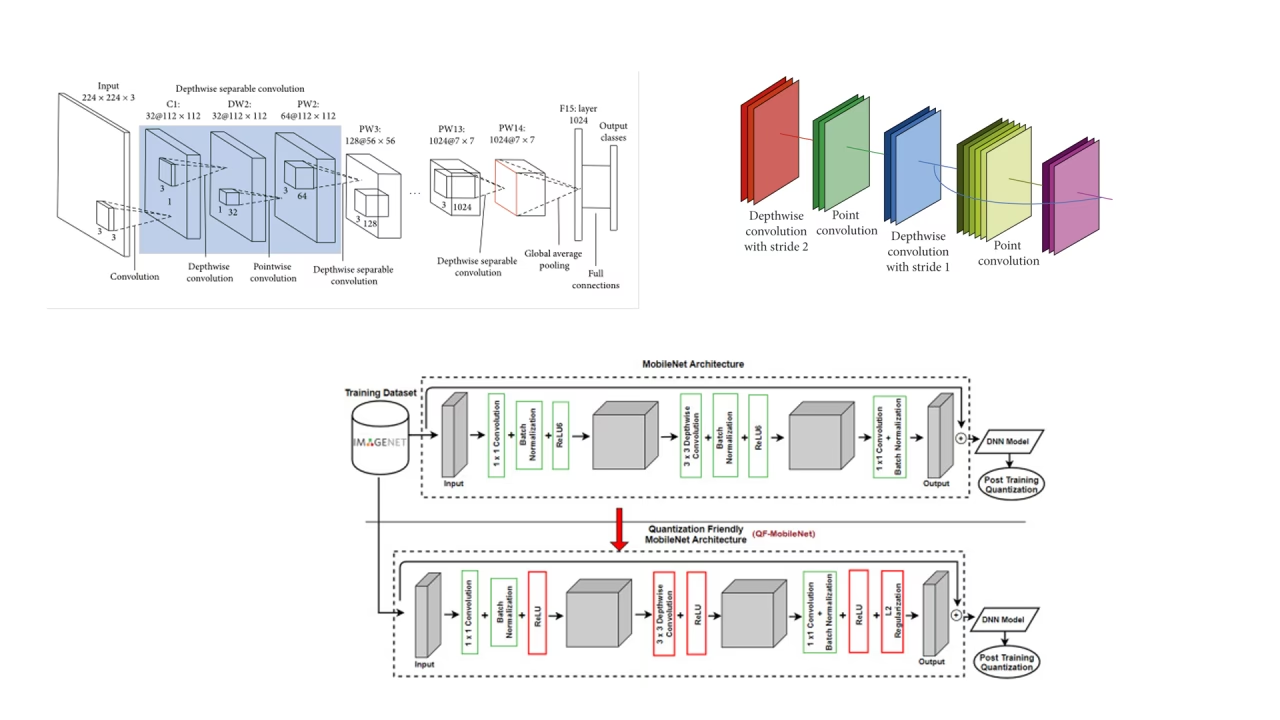
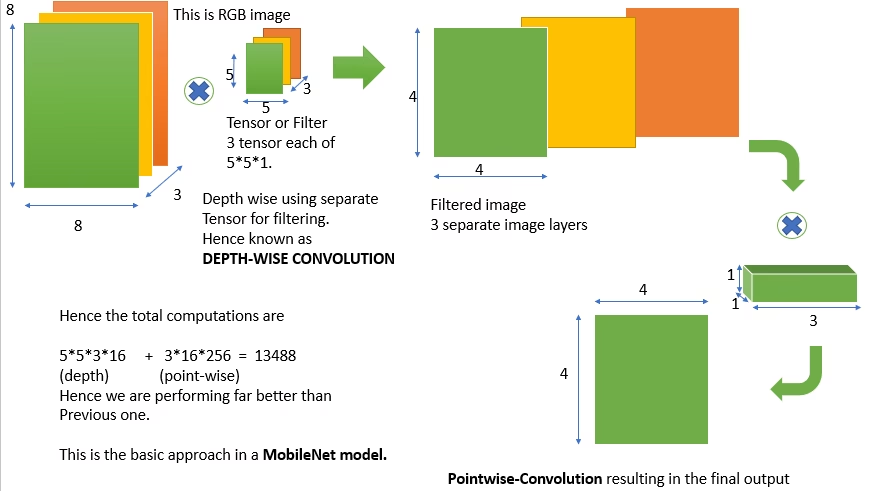
En typisk opsætning involverer at bruge MobileNetV2 som en 'backbone' eller 'feature extractor'. Dette betyder, at MobileNetV2's lag bruges til at udtrække meningsfulde træk fra inputbilledet. Disse træk føres derefter ind i SSD-hovedet, som udfører det faktiske detekteringsarbejde. Resultatet er en hurtig og præcis objektdetekteringsmodel, der kan køre effektivt på mobile enheder.
Implementering af Realtids Objektdetektering med MobileNet og SSD
For at implementere realtids objektdetektering med MobileNetV2 og SSD skal du typisk bruge et framework som TensorFlow eller OpenCV, der understøtter disse modeller. Processen involverer generelt følgende trin:
Nødvendige Komponenter
- En computer eller mobil enhed med et webcam eller en anden videokilde.
- Forudtrænede MobileNetV2 SSD-modeller. Disse inkluderer typisk modelarkitekturen (f.eks. i `.prototxt`-format) og de trænede vægte (f.eks. i `.caffemodel` eller `.pb`-format).
- Et bibliotek til computer vision som OpenCV, der kan indlæse modellerne og udføre inferens.
Trin-for-Trin Implementering (Konceptuel)
- Installer Nødvendige Biblioteker: Sørg for, at du har Python, OpenCV og TensorFlow installeret.
- Indlæs Modellen: Brug OpenCV's `dnn` modul til at indlæse MobileNetSSD-modellen. Dette involverer at angive stien til modelkonfigurationsfilen (f.eks. `MobileNetSSD_deploy.prototxt`) og modelvægtsfilen (f.eks. `MobileNetSSD_deploy.caffemodel`).
- Start Videokilde: Initialiser adgang til webcam eller en videofil.
- Behandling af Frames: Start en løkke, der kontinuerligt fanger frames fra videokilden.
- Objektdetektering: For hver frame:
- Forbehandl billedet for at matche modellens inputkrav (ændring af størrelse, normalisering osv.).
- Send det forbehandlede billede til modellen for at få detektioner. Modellen returnerer typisk en liste over bounding boxes, konfidensscores og klasselabels.
- Visualisering: Tegn bounding boxes og de tilsvarende klasselabels på den originale frame baseret på de opnåede detektioner.
- Visning: Vis den behandlede frame med de detekterede objekter.
- Afslutning: Giv brugeren mulighed for at afslutte programmet (f.eks. ved at trykke på en bestemt tast).
Almindelige Fejl og Løsninger
Når man arbejder med deep learning-modeller, især med indlæsning af modeller via frameworks som OpenCV's DNN-modul, kan man støde på forskellige fejl. To almindelige fejl, der er nævnt i din forespørgsel, relaterer sig til parsing af modelkonfigurationsfiler:
Fejl 1: `Error parsing text-format opencv_caffe.NetParameter`
Denne fejl indikerer ofte, at konfigurationsfilen (`.prototxt`) er korrupt eller indeholder ugyldige tegn. Dette kan skyldes en ufuldstændig download eller redigering af filen med et program, der introducerer skjulte, ikke-ASCII-tegn.
Løsning:
- Slet den eksisterende fil: Fjern den nuværende `MobileNetSSD.txt` (eller den relevante `.prototxt`-fil) fra din projektmappe.
- Download en ny kopi: Hent en ren og verificeret version af filen. Et godt sted at starte er det officielle MobileNet-SSD GitHub-repository, som foreslået med linket til `MobileNetSSD_deploy.prototxt`.
- Brug en simpel teksteditor: Åbn den ny-downloadede fil med en simpel teksteditor (som Notepad på Windows eller TextEdit på Mac i ren tekst-tilstand) for at sikre, at der ikke er introduceret yderligere tegn.
Fejl 2: `FAILED: fs.is_open (). Can't open "..."`
Denne fejl er mere ligetil og betyder, at OpenCV's DNN-modul ikke kan finde eller tilgå den angivne modelkonfigurationsfil eller vægtsfil på den angivne sti. Dette kan skyldes:
- Forkert filsti: Stien til filen er angivet forkert i koden.
- Filen mangler: Filen er simpelthen ikke til stede i den forventede mappe.
- Tilladelser: Programmet har ikke de nødvendige læserettigheder til filen eller mappen.
Løsning:
- Dobbelttjek filstien: Verificer, at den sti, du angiver i din kode (`modelpath` og `deploypath`), præcist matcher placeringen af dine model- og konfigurationsfiler. Brug relative stier omhyggeligt, eller angiv absolutte stier for at undgå tvivl.
- Bekræft filens eksistens: Sørg for, at både `.prototxt`-filen og `.caffemodel`-filen (eller tilsvarende filer for andre formater) ligger i den mappe, din kode forventer, eller at stien er korrekt angivet.
- Tjek filrettigheder: Selvom det er sjældent på personlige computere, kan filrettigheder begrænse adgangen. Sørg for, at din brugerkonto har læserettigheder til filerne.
Kørsel af Koden
Når du har sikret dig, at alle filer er korrekte og placeret som forventet, kan du køre din Python-script. Kommandoen til at udføre scriptet vil typisk være:
python dit_script_navn.py Sørg for at erstatte `dit_script_navn.py` med det faktiske navn på din Python-fil.
Konklusion
MobileNetV2 er en fremragende model for opgaver, der kræver hastighed og effektivitet, men det er vigtigt at bruge den korrekte arkitektur til den specifikke opgave. Mens Keras' standardimplementering er fantastisk til billedklassifikation, kræver objektdetektering en kombination som MobileNetV2 med SSD. Ved at forstå forskellene, følge implementeringsvejledningen og være opmærksom på potentielle fejl, kan du succesfuldt anvende MobileNetV2 til kraftfuld realtids objektdetektering.
Ofte Stillede Spørgsmål (FAQ)
1. Kan MobileNetV2 bruges direkte til objektdetektering?
Nej, Keras' standard `applications.MobileNetV2` er designet til billedklassifikation. For objektdetektering skal MobileNetV2 bruges som en backbone i en dedikeret objektdetekteringsarkitektur som SSD eller YOLO.
2. Hvad er fordelen ved at bruge MobileNetV2 med SSD?
Fordelen er, at man kombinerer den lette og hurtige MobileNetV2-arkitektur med SSD's evne til at udføre objektdetektering effektivt i et enkelt gennemløb, hvilket resulterer i en model, der er ideel til realtidsapplikationer på mobile og indlejrede enheder.
3. Hvilke filer er nødvendige for at køre en MobileNet SSD-model med OpenCV?
Du skal typisk bruge to filer: en konfigurationsfil (oftest en `.prototxt`-fil, der beskriver netværkets struktur) og en vægtsfil (f.eks. en `.caffemodel` eller `.pb`-fil, der indeholder de trænede parametre).
4. Hvorfor får jeg fejlmeddelelsen 'Error parsing text-format'?
Denne fejl skyldes næsten altid en korrupt eller forkert formateret `.prototxt`-fil. Sørg for at downloade en ren version og undgå at redigere den med programmer, der kan introducere ugyldige tegn.
5. Hvordan løser jeg 'FAILED: fs.is_open (). Can't open...' fejlen?
Denne fejl indikerer, at programmet ikke kan finde den angivne model- eller konfigurationsfil. Kontroller, at filstierne i din kode er korrekte, og at filerne rent faktisk eksisterer på de angivne placeringer.
Hvis du vil læse andre artikler, der ligner MobileNetV2 til Objektdetektering: En Dybdegående Guide, kan du besøge kategorien Teknologi.