30/06/2025
Firehjulstyring: Revolutionerer Køretøjers Ydeevne
I bilindustrien har jagten på forbedret køredynamik og manøvredygtighed altid været central. En af de mest markante teknologiske fremskridt inden for dette område er introduktionen af firehjulstyring. Hvor traditionelle køretøjer primært har fokuseret på styring af forhjulene, åbner firehjulstyring op for et helt nyt niveau af kontrol, især under komplekse manøvrer. Denne artikel dykker ned i, hvordan firehjulstyring fungerer, dens fordele, og hvordan den påvirker køretøjers ydeevne, især i situationer som negativ-fase manøvrering.
Grundlæggende om Firehjulstyring
Firehjulstyring er et system, hvor både for- og baghjulene kan dreje. Afhængigt af hastighed og styreinput kan baghjulene dreje i samme retning som forhjulene (medstyring) eller i modsat retning (modstyring). Denne fleksibilitet giver en række fordele, der kan forbedre både stabilitet og agilitet.
Typer af Firehjulstyring
Der findes primært to hovedtyper af firehjulstyringssystemer:
- Elektronisk Styret Firehjulstyring (E-AWS): Dette system bruger elektroniske aktuatorer til at styre baghjulene baseret på forskellige sensorinput, såsom hastighed, ratudslag og vejforhold. Det er den mest almindelige type i moderne personbiler og giver den største fleksibilitet i styringsstrategier.
- Mekanisk Styret Firehjulstyring: Dette system bruger en mekanisk forbindelse mellem for- og baghjulsophæng. Typisk drejer baghjulene i modsat retning af forhjulene ved lave hastigheder for at forbedre manøvredygtighed, og i samme retning ved højere hastigheder for at stabilisere køretøjet. Selvom det er enklere, er det mindre fleksibelt end elektroniske systemer.
Hvordan Firehjulstyring Forbedrer Ydeevnen
Firehjulstyring tilbyder signifikante forbedringer i forhold til traditionelle to-hjulstyringssystemer:
1. Forbedret Manøvredygtighed ved Lave Hastigheder
Ved lave hastigheder, især i trange områder som parkeringspladser eller bykørsel, kan baghjulene dreje i modsat retning af forhjulene. Dette reducerer drejekredsen markant, hvilket gør det lettere at manøvrere bilen. Forestil dig at skulle vende bilen på et snævert sted – med firehjulstyring bliver det betydeligt nemmere.
2. Øget Stabilitet ved Højere Hastigheder
Ved højere hastigheder kan baghjulene dreje i samme retning som forhjulene. Dette system kaldes medstyring og hjælper med at reducere sideskred og forbedre køretøjets stabilitet under hurtige vognbaneskift eller i kurver. Det bidrager til en mere forudsigelig og kontrolleret køreoplevelse.
3. Reduceret Dækslid
Ved at tillade baghjulene at følge en mere naturlig bane i sving, kan firehjulstyring reducere den laterale kraft på bagdækkene. Dette kan potentielt føre til et reduceret dækslid over tid.
4. Respons på Styring
Generelt giver firehjulstyring en mere direkte og responsiv styringsfølelse. Føreren oplever en forbedret forbindelse til køretøjet, da det reagerer hurtigere og mere præcist på styreinput.
Firehjulstyring og Negativ-Fase Manøvrering
Negativ-fase manøvrering, ofte kendt som omvendt styring eller undvigemanøvrer, er situationer, hvor føreren hurtigt skal ændre retning for at undgå en forhindring. Disse manøvrer tester grænserne for et køretøjs dynamiske egenskaber.
I disse kritiske situationer spiller firehjulstyring en afgørende rolle. Når et køretøj med traditionel to-hjulstyring pludselig skal undvige, kan det opleve en tendens til at miste kontrol, især bagenden af bilen. Baghjulene, der ikke styrer, kan begynde at skride ud, hvilket fører til overstyring.
Med et avanceret firehjulstyringssystem kan baghjulene aktivt justere deres vinkel for at modvirke disse kræfter. Ved at dreje baghjulene i modsat retning af forhjulene under et hurtigt undvigemanøvrer, kan systemet hjælpe med at holde køretøjet stabilt og på den ønskede bane. Dette er kendt som aktiv styringskontrol og er et område, hvor forskning, som den der refereres til i de angivne artikler, fortsat udvikler sig.
For eksempel undersøger studier som Fu et al. (2023) og Huang et al. (2021) brugen af avancerede kontrolstrategier, herunder Stanley-PID og neurale netværk, til at optimere firehjulstyringens respons under dynamiske forhold. Disse systemer kan analysere køretøjets tilstand og vejforhold i realtid for at foretage de nødvendige justeringer af baghjulsstyringen, hvilket er essentielt for sikkerhed under negativ-fase manøvrering.
Forskning i styringsstabilitet og sporingskontrol er central for at forstå den fulde effekt af firehjulstyring i disse scenarier. Chai et al. (2024) og Liu et al. (2024) arbejder med optimale, robuste sporingskontrolstrategier og model-fri autonom styring, hvilket indikerer et øget fokus på at udnytte firehjulstyring til at opnå enestående ydeevne under alle forhold.
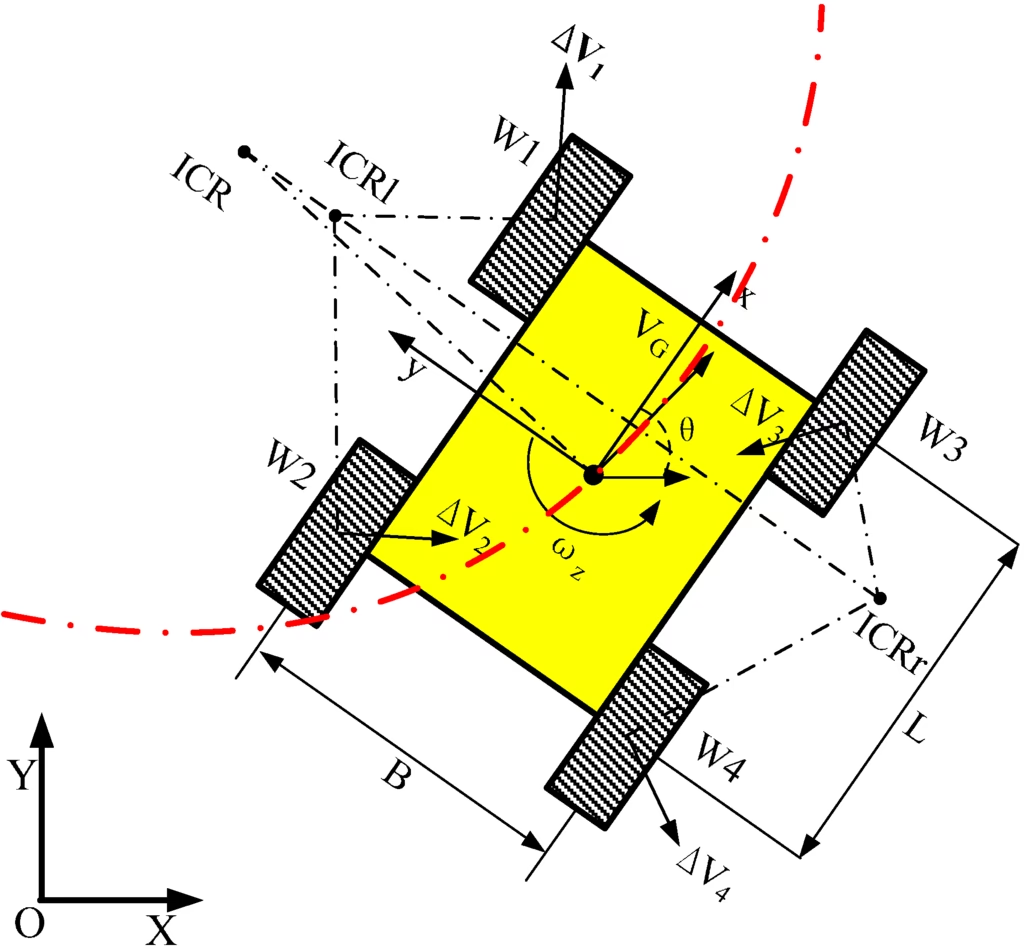
Sammenligning af Kinematik Modeller
For at forstå styringens mekanik er det nyttigt at se på forskellige kinematikmodeller. Mens traditionelle robotter kan modelleres med unicycle, bicycle eller differential drive kinematik, kræver firehjulstyring en mere kompleks model, der inkluderer styrevinklen for både for- og baghjul.
Her er en oversigt over nogle grundlæggende modeller:
| Model | Tilstand (State) | Styreinput | Beskrivelse |
|---|---|---|---|
| Unicycle | [x, y, θ] | [v, ω] | Enkel model med en styrende akse. |
| Bicycle | [x, y, θ] | [v, ψ] eller [v, ω] | Bil-lignende model med forhjulsstyring (ψ). |
| Differential Drive | [x, y, θ] | [ω_L, ω_R] | To uafhængigt drevne hjul. |
| Ackermann | [x, y, θ, ψ] | [v, ψ̇] | Bil-lignende model med Ackermann-styring, hvor både for- og baghjul kan dreje. Kræver styrevinkel (ψ) som del af tilstanden. |
Ackermann-kinematikken, som beskrevet i den medfølgende tekst, er særligt relevant for køretøjer, der efterligner bilers bevægelsesmønstre. For firehjulstyring bliver denne model endnu mere kompleks, da den skal tage højde for styringen af begge aksler. Forskning inden for området, som f.eks. Seo og Kang (2025) om dynamisk model-fri hastighedsestimering, bidrager til at forbedre forståelsen af disse komplekse systemer.
Fremtiden for Firehjulstyring
Udviklingen inden for firehjulstyring er fortsat i fuld gang. Med fremskridt inden for kunstig intelligens, maskinlæring og avanceret sensorteknologi bliver disse systemer stadig mere sofistikerede. Integrationen af firehjulstyring med andre aktive systemer, såsom aktiv aerodynamik og momentfordeling, som nævnt i Ahangarnejad et al. (2019), lover endnu større forbedringer i køretøjers ydeevne og sikkerhed.
Forskning i robotkinematik og styringsstrategier for mobile robotter, som illustreret ved Ryu et al. (2024) og Saenz et al. (2021), giver også værdifuld indsigt, der kan overføres til bilteknologi. Disse studier fokuserer på præcis bevægelsesstyring og respons, hvilket er direkte relevant for optimering af firehjulstyringssystemer.
I takt med at autonome køretøjer bliver mere udbredte, vil avancerede styringssystemer som firehjulstyring blive endnu vigtigere. Evnen til at navigere sikkert og effektivt i komplekse miljøer, især under udfordrende manøvrer, vil i høj grad afhænge af sofistikerede styringsteknologier.
Konklusion
Firehjulstyring repræsenterer et betydeligt fremskridt inden for køretøjsteknologi. Fra forbedret manøvredygtighed ved lave hastigheder til øget stabilitet og sikkerhed under kritiske manøvrer som negativ-fase styring, tilbyder systemet klare fordele. Den fortsatte forskning og udvikling på området lover endnu mere avancerede og effektive løsninger i fremtiden, hvilket vil forme måden, vi oplever kørsel på.
Ofte Stillede Spørgsmål
Hvad er forskellen på firehjulstyring og traditionel to-hjulstyring?
Ved to-hjulstyring drejer kun forhjulene. Firehjulstyring tillader både for- og baghjulene at dreje, hvilket giver øget manøvredygtighed og stabilitet.
Hvornår er firehjulstyring mest nyttig?
Firehjulstyring er mest nyttig ved lave hastigheder for at forbedre manøvredygtighed (f.eks. parkering) og ved høje hastigheder for at øge stabilitet under hurtige retningsskift.
Kan firehjulstyring forbedre sikkerheden?
Ja, især under undvigemanøvrer og i glatte forhold, hvor systemet kan hjælpe med at opretholde kontrol og forhindre udskridning.
Er firehjulstyring standard i alle nye biler?
Nej, det er typisk en valgfri funktion eller standard på mere luksuriøse eller sportslige modeller, men det bliver mere udbredt.
Hvis du vil læse andre artikler, der ligner Firehjulstyring: Revolutionerer Køretøjers Ydeevne, kan du besøge kategorien Teknologi.