
13/02/2022
Moderne teknologi former vores verden i et hastigt tempo, og inden for robotik ser vi en af de mest fascinerende udviklinger i form af modulære robotter. Forestil dig en robot, der ikke er bundet til én form eller funktion, men som kan ændre sig og tilpasse sig sine omgivelser, ligesom en Transformer. Dette er ikke længere science fiction, men virkeligheden inden for modulær robotik. Denne innovative tilgang til robotdesign åbner døren for en helt ny æra af automatisering og interaktion mellem mennesker og maskiner, hvor robotter bliver mere alsidige, robuste og i stand til at håndtere uforudsete udfordringer.
I modsætning til traditionelle robotter, der er bygget til en specifik opgave med en fast struktur, består modulære robotsystemer af mange mindre, selvstændige enheder kaldet "moduler". Hvert modul er et kompakt kraftcenter, der indeholder sine egne sensorer, aktuatorer (bevægelsesmekanismer) og computerkapacitet. Det, der gør dem unikke, er deres evne til at forbinde sig med hinanden via specielle docking-grænseflader. Denne sammenkobling muliggør skabelsen af større og mere komplekse robotstrukturer, der kan ændre deres form og funktionalitet efter behov. Forestil dig byggeklodser, der intelligent kan samle sig selv til forskellige maskiner, alt efter hvad opgaven kræver.
Konceptet med modulære robotter er dybt rodfæstet i ideen om rekonfigurerbarhed. Dette betyder, at robotten kan omarrangere sine dele for at ændre sin morfologi – altså sin fysiske form. Når denne omkonfigurationsproces sker autonomt, uden ekstern styring, taler vi om selvrekonfigurerbarhed. Det er en fascinerende proces, hvor diskrete enheder binder sig sammen og løsner sig fra hinanden på en reversibel måde, hvilket giver robotten enestående tilpasningsevne. Denne evne til at transformere sig er ikke blot en teknologisk bedrift, men et fundamentalt skridt hen imod robotter, der kan operere mere effektivt i dynamiske og uforudsigelige miljøer.
Fordele ved modulære robotsystemer: En ny æra af fleksibilitet
Modulær robotik tilbyder en række væsentlige fordele, der adskiller den fra mere konventionelle robotdesign. Disse fordele er ikke kun funktionelle, men også potentielt økonomiske, hvilket gør teknologien særligt attraktiv for fremtidige anvendelser.
Uovertruffen tilpasningsevne
Den mest fremtrædende fordel er modulære robotters evne til at tilpasse sig ændringer i miljøet. En robot med en fast struktur kan være yderst effektiv til én specifik opgave eller i ét specifikt terræn, men den vil ofte komme til kort, når forholdene ændrer sig. En modulær robot kan derimod ændre sin konfiguration fra en benrobot, der er ideel til ujævnt terræn, til en slangerobot, der kan sno sig gennem snævre passager, eller endda en rullende robot, der er hurtig på flade overflader. Denne morfologiske fleksibilitet betyder, at den samme robot kan udføre et bredt spektrum af opgaver i vidt forskellige omgivelser, hvilket minimerer behovet for at udvikle og implementere flere specialiserede robotter.
Øget funktionalitet og specialisering
Udover at ændre deres grundform kan modulære robotter også forbedre deres funktionalitet ved at tilføje specialiserede enheder. Forestil dig en grundlæggende robot, der har brug for at gribe fat i genstande; den kan simpelthen docke med en griberenhed. Har den brug for at se bedre? Et kameramodul kan tilføjes. Kræver opgaven længere driftstid? Ekstra batterimoduler kan tilsluttes. Denne mulighed for at udvide og tilpasse funktioner ved at tilføje eller fjerne specifikke moduler giver en hidtil uset alsidighed. Robotten kan skræddersys til den præcise opgave, hvilket maksimerer effektiviteten uden at skulle bygge en helt ny robot fra bunden.
Økonomiske og logistiske fordele
På længere sigt kan modulære robotter potentielt tilbyde betydelige økonomiske fordele. Ved at bygge komplekse robotstrukturer ud fra et enkelt (eller få) rudimentære, masseproducerede moduler kan de samlede produktionsomkostninger reduceres markant. Dette ligner princippet med LEGO-klodser: et lille sæt standardklodser kan samles til utallige forskellige strukturer. Desuden forenkles logistikken for reservedele og vedligeholdelse, da man kun behøver at lagerføre et begrænset antal modultyper. Hvis et modul fejler, kan det nemt udskiftes, hvilket reducerer nedetid og reparationsomkostninger.
Anvendelse i farlige og utilgængelige miljøer
Modulære robotter er særligt velegnede til miljøer, der er for farlige eller utilgængelige for mennesker. Dette inkluderer områder ramt af naturkatastrofer, forurenede zoner, rumforskning eller dybhavsmissioner. Deres evne til at tilpasse sig ustruktureret terræn, kombineret med potentialet for selvreparation af defekte komponenter gennem selvdemontering og omkonfiguration, kan revolutionere teknologien inden for ekstreme applikationer. I situationer, hvor menneskelig indgriben er umulig eller forbundet med stor risiko, kan modulære robotter udføre kritisk arbejde, udforske ukendte territorier og indsamle værdifulde data.
Udfordringer og fremtidsperspektiver for modulær robotik
På trods af de mange lovende fordele er modulær robotik stadig et felt i udvikling. Med den nuværende teknologi vil en enkelt robot med fast struktur, der er skræddersyet til en specifik opgave, sandsynligvis stadig overgå sin modulære modpart i ydeevne for den pågældende opgave. Dette skyldes ofte de ekstra kompleksiteter forbundet med docking, kommunikation mellem moduler og styring af skiftende konfigurationer.
Ikke desto mindre lover modulære robotters brede anvendelighed en fundamental ændring i den rolle, de spiller i vores samfund. Et af de mest bemærkelsesværdige områder er integrationen af mobile robotter i bymiljøer side om side med mennesker. Denne integration har længe været hæmmet af de betydelige udfordringer, som det ustrukturerede menneskeskabte miljø medfører – tænk på trapper, døre, møbler og uforudsigelige forhindringer. De adaptive evner hos modulære robotter repræsenterer imidlertid den nøgleteknologi, der kræves for at opnå en sådan integration. Ved at give robotsystemer den morfologiske rekonfigurerbarhed, der tilpasser deres former til ægte arkitektoniske elementer, kan de navigere og operere problemfrit i komplekse menneskeskabte omgivelser.
Forskningen inden for feltet er intens, med fokus på at forbedre modulernes robusthed, docking-mekanismernes pålidelighed og de algoritmer, der styrer selvrekonfiguration. Succesen med modulære robotter afhænger i høj grad af udviklingen af mere avancerede styresystemer, der kan håndtere den dynamiske topologi af robotten, samt af mere energieffektive og kompakte moduler. Potentialet er dog enormt, og vi kan forvente at se modulære robotter spille en stadig større rolle i alt fra logistik og produktion til katastrofehjælp og personlig assistance.
Hvad er modulære mobile robotsystemer (MMRS)?
Inden for modulær robotik er et særligt fokusområde de Modulære Mobile Robotsystemer (MMRS). Selvom den oprindelige tekst ikke giver en eksplicit definition af MMRS, kan vi udlede fra konteksten, at det refererer til modulære robotsystemer, der specifikt er designet med mobilitet for øje. Disse systemer kombinerer modulær robotiks fordele med evnen til at bevæge sig frit i forskellige miljøer.
MMRS er typisk designet til at overkomme forhindringer og navigere i komplekse, ustrukturerede terræner, hvilket gør dem ideelle til opgaver som rekognoscering, levering eller inspektion i områder, der er vanskelige at nå. Forskning inden for MMRS fokuserer ofte på at udvikle moduler, der kan skifte mellem forskellige former for mobilitet – f.eks. fra hjul til ben eller endda til flyvende konfigurationer – for at optimere deres bevægelse i et givent miljø. Dette er et område, hvor den kvintessentielle modulære robot, som beskrevet nedenfor, virkelig kommer til sin ret.
Den kvintessentielle modulære robot: Alsidighed i sin reneste form
En "kvintessentiel" modulær robot er ikke en, der er designet til en bestemt opgave. Tværtimod er dens essens dens alsidighed. Det er et system, der er i stand til at tilpasse sin form og sine funktioner i henhold til det miljø, den opererer i, gennem en proces kaldet morfogenese. Denne formskiftende evne opnås ved midlertidig fastgørelse og løsrivelse af flere moduler.
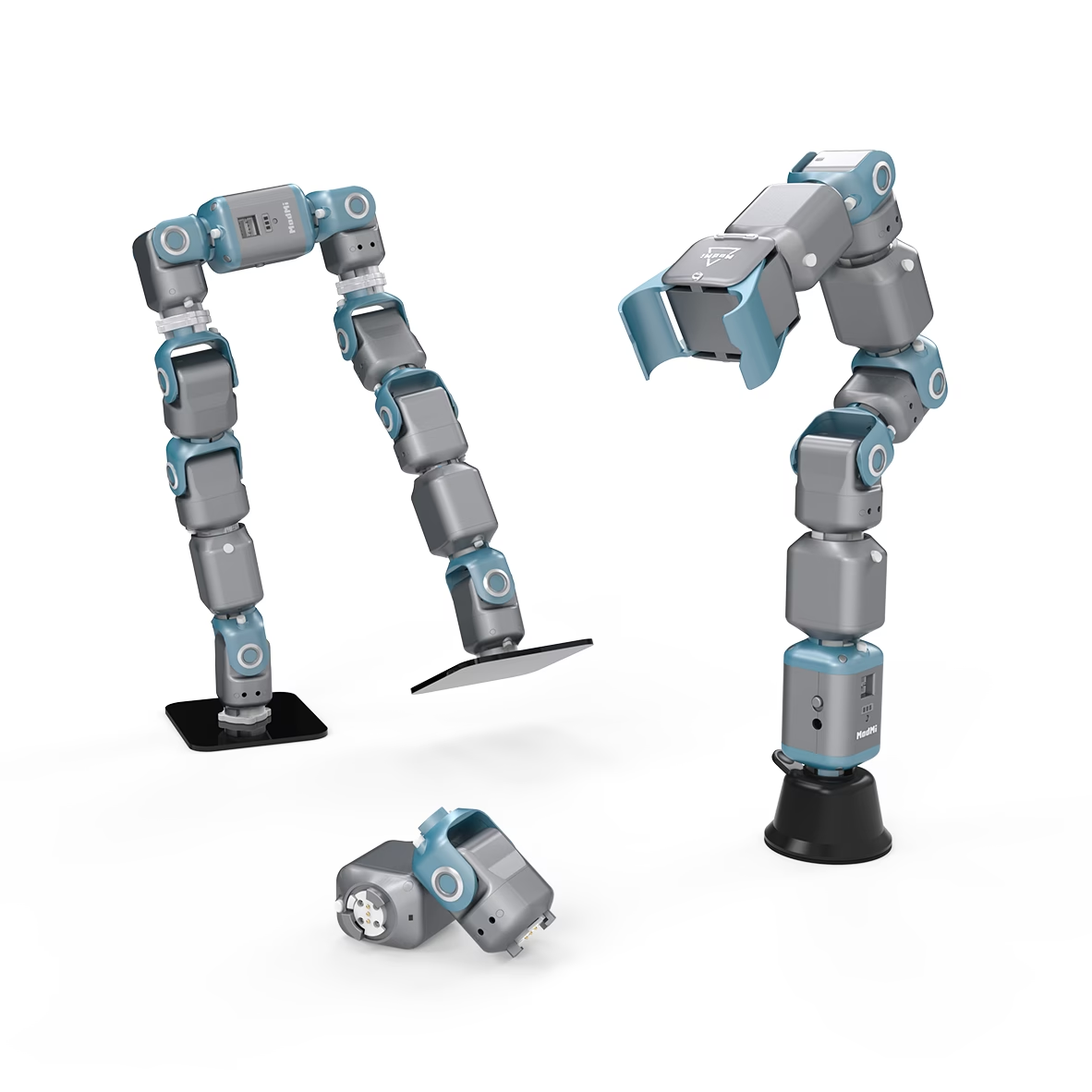
Forestil dig et design af homogene mobile robotmoduler, der har evnen til situationelt at tilpasse sig forskellige former og besidder en passiv hjul-til-ben rekonfigurerbarhed. Hvert af disse moduler er udstyret med fire frihedsgrader (pan, tilt, venstre og højre hjul), neodym permanentmagneter til docking med nabomoduler og en servostyret koblingsmekanisme til frakobling. Tilstrækkelige indbyggede proprioceptive sensorer supplerer dette, hvilket gør hardwaren fuldt kompatibel for komplet autonomi og selvrekonfigurering i et fjernt, menneskeutilgængeligt eller fjendtligt miljø. Denne type robot repræsenterer toppen af modulær robotik, hvor systemet uafhængigt kan vurdere situationen og omkonfigurere sig selv for at udføre opgaven bedst muligt.
Sammenligning: Faste robotter vs. Modulære robotter
For bedre at forstå de unikke fordele ved modulære robotter, lad os sammenligne dem med traditionelle robotter med fast struktur:
| Kriterium | Robot med Fast Struktur | Modulær Robot |
|---|---|---|
| Fleksibilitet/Tilpasningsevne | Lav; designet til specifikke opgaver og miljøer. | Høj; kan ændre form og funktion for at tilpasse sig varierende opgaver og terræner. |
| Opgavespecifik ydeevne | Ofte højere ydeevne inden for sin specialiserede opgave. | Kan være lavere i specialiserede opgaver, men højere i alsidighed. Potentiale for at matche ydeevne i fremtiden. |
| Økonomi (produktion) | Højere omkostninger pr. enhed for komplekse, specialiserede designs. | Potentielt lavere omkostninger grundet masseproduktion af standardmoduler. |
| Vedligeholdelse/Reparation | Kan være kompleks og dyr; kræver specialiserede reservedele. | Enklere; defekte moduler kan udskiftes, potentielt selvreparation. |
| Anvendelsesmiljø | Bedst i strukturerede, forudsigelige miljøer (f.eks. fabrikker). | Ideel i ustrukturerede, dynamiske og farlige miljøer (f.eks. katastrofezoner, rummet). |
| Udviklingstid | Lang udviklingstid for nye, specialiserede designs. | Hurtigere tilpasning til nye opgaver ved omkonfiguration af eksisterende moduler. |
Ofte Stillede Spørgsmål (FAQ) om modulær robotik
Kan modulære robotter reparere sig selv?
Ja, potentialet for selvreparation er en af de store fordele ved modulær robotik. Hvis et modul fejler, kan robotten potentielt selv demontere det defekte modul og erstatte det med et fungerende reservemodul, eller omkonfigurere sig for at omgå det defekte modul og fortsætte sin opgave. Dette er især værdifuldt i miljøer, hvor menneskelig indgriben er umulig eller farlig.
Er modulære robotter dyre?
I den nuværende udviklingsfase kan prototypemodulære robotter være dyre på grund af den komplekse forskning og udvikling. Men på lang sigt er en af de primære økonomiske fordele netop muligheden for at reducere omkostningerne. Ved at masseproducere et lille antal standardiserede modultyper, i stedet for at bygge mange forskellige specialiserede robotter, forventes produktionsomkostningerne at falde betydeligt. Dette gør dem potentielt mere omkostningseffektive for en bred vifte af applikationer.
Hvor bruges modulære robotter i dag?
Modulære robotter er primært stadig et område for forskning og udvikling, men de viser lovende resultater i laboratorieindstillinger og i visse specialiserede testmiljøer. Anvendelsesområder omfatter prototyper til rumudforskning, undervandsinspektion, katastrofehjælp (f.eks. søgning efter overlevende i murbrokker) og tilpasning i produktionslinjer. Selvom de endnu ikke er udbredt i kommercielle eller industrielle applikationer i samme grad som faste robotter, vokser deres potentiale hurtigt.
Hvad er forskellen mellem rekonfigurerbar og selvrekonfigurerbar?
En "rekonfigurerbar" robot er en robot, der kan ændre sin form eller struktur. Denne ændring kan dog kræve ekstern assistance, f.eks. en menneskelig operatør, der manuelt omarrangerer modulerne. En "selvrekonfigurerbar" robot går et skridt videre; den kan autonomt, uden menneskelig indgriben, ændre sin egen form og struktur som svar på ændringer i miljøet eller opgaven. Dette indebærer avancerede sensorer og styringsalgoritmer, der gør det muligt for robotten selv at bestemme og udføre de nødvendige omkonfigurationer.
Vil modulære robotter erstatte alle andre robotter?
Det er usandsynligt, at modulære robotter fuldstændig vil erstatte alle andre typer robotter. Robotter med fast struktur vil sandsynligvis fortsat være de mest effektive og omkostningseffektive løsninger til mange specifikke, gentagne opgaver i kontrollerede miljøer (f.eks. samlebånd på fabrikker). Modulære robotter vil derimod udfylde en voksende niche for opgaver, der kræver høj tilpasningsevne, alsidighed og evnen til at operere i uforudsigelige eller farlige miljøer. De vil snarere komplementere eksisterende robotteknologier end fuldstændigt erstatte dem, hvilket udvider det samlede anvendelsesområde for robotter i samfundet.
Fremtiden er foranderlig
Modulær robotik repræsenterer en spændende og potentielt revolutionerende gren inden for robotteknologien. Selvom der stadig er udfordringer at overvinde, er visionen om robotter, der autonomt kan tilpasse sig enhver situation, utrolig kraftfuld. Fra at navigere i byens komplekse landskaber til at udforske de fjerneste afkroge af rummet og havdybet, lover modulære robotter en fremtid, hvor maskiner er mere intelligente, mere alsidige og mere i stand til at arbejde side om side med mennesker i en konstant skiftende verden. Deres evne til at transformere sig selv gør dem til den ultimative løsning for en dynamisk og uforudsigelig fremtid.
Hvis du vil læse andre artikler, der ligner Modulær Robotik: Fremtidens Foranderlige Robotter, kan du besøge kategorien Teknologi.